Fastest Soft Robot
Soft machines in general exhibit small manipulation strength and slow locomotion speed. This is caused due to the intrinsic limitations of the soft material. In general, high-speed locomotion requires fast response, high force output, large strain energy storage and precise motion of the actuators. Soft-bodied robots, due to material softness and compliance, typically show low force output, large deformation, and slow response time. Soft materials have difficulties in storing and releasing large amounts of energy rapidly, restricting the robots to gain high speed locomotion and high-strength object manipulation. The previous soft crawler soft robots had limited speed due to always being in contact with the ground. Unlike the recent trends in slow robotics, the Cheetah robot designed by the research group from North Carolina State University leverages tunable bistability that can be used to explore the ability of soft robotics to quickly store and release energy to a greater extent.
The robot is inspired by the mechanics of the cheetah and can be moved rapidly on solid surfaces and water as compared to the previous work done in the soft robots. The robot is also capable of grabbing delicate and heavy objects with sufficient strength. Mobile robots are built to explore areas of extreme environments or unreachable locations. Soft robots could be the best option for gentle and safe interaction with such an environment. Soft mobile robotics is a very young area of research and has huge scopes for improvement. In such a robot, the legs help produce dexterous locomotion. The idea of soft robotic locomotion is used in the soft robotic cheetah discussed.
The robots were inspired by the cheetah to create a type of soft robot with a bistable spine that is powered by springs. Here, the bistable spine uses two stable states, meaning that the robot has two stable states and these states can be switched by rapidly pumping air into channels that line the soft, silicone robot. The amount of energy released by switching between the two states, allows the cheetah-like robot to rapidly exert force against the ground and in turn enables the feet of the robot to leave the ground, further enabling it to move across the surface faster. This provides a great application for high-speed jumping locomotion. One big advantage of this method is that changing the pretension or stiffness of the spring allows to tune the energy resulting in change of speed.
The robots were inspired by the cheetah to create a type of soft robot with a bistable spine that is powered by springs.
According to the researchers, the Leveraging Elastic instabilities for Amplified Performance (LEAP) design could produce better swimming speeds for soft robots. This group of researchers demonstrated that the LEAP design could produce better swimming speeds for soft robots. A fin is more effective than a foot for a LEAP robot to swim at a speed of 0.78 body lengths per second (BL/s). It shows better performance than the previous result which was 0.7 BL/s. It is shown experimentally that the robot achieved a linear locomotion speed of 174.4 mm/s or 2.49 BL/s, at 20 kPa pressure.
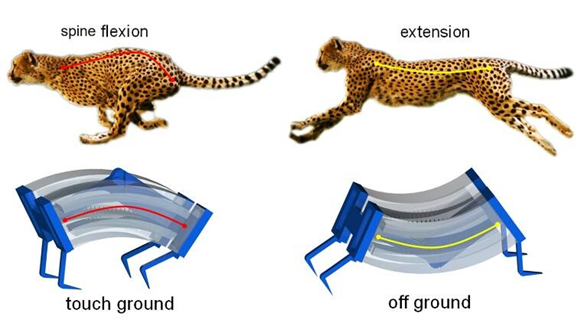
Figure 1: Demonstration of the cheetah and the soft robotic movement

Figure 2: Experimental view of the cheetah soft robotic movement
Stiffening and softening are important features of soft robotics for maintaining the change in shape and realizing adaptable force output in different working environments. To make a soft gripper with tunable stiffness, a dual actuation that allows for independent operation of the pneumatic actuator or a motor-driven tendon actuator is designed in order to grip delicate objects and heavy objects respectively. A DC electric motor connected by a tendon is attached to the end of the extension spring. When the DC motor is actuated, it pulls the tendon and thus the spring is extended. It allows the actuator to bend and close the fingers. After reaching the limiting angle, the extension of the spring stiffens the actuator. The actuation mechanism is shown in figure 3. An illustration of the robots gripping the delicate and heavy objects can be seen in figures 4 and 5 respectively.
There are other types of soft robots that can lift delicate objects like an egg or objects that are as heavy as 10 kg and more. Additionally, a combination of such robots is also being researched for being able to work with different object weights.
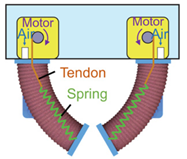
Figure 3: The dual actuation design
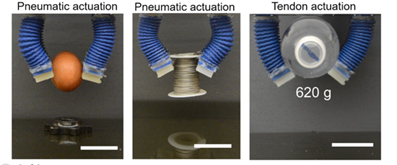
Figure 4: The robot handling delicate objects

Figure 5: The robot handling heavy objects
This cheetah-like design highlights the fast and strong characteristics soft robotic applications. Cheetah is one of the fastest animals on land. Their speed and power are based on the flexing capacity of the spine. Researchers wanted to develop a soft robot based on the spring power and bistable state. This further helps in switching between stable states instantly by producing air into the channels inside the soft robot with silicone structure. Thesebistable states can help to release a significant amount of energy by exerting the force against the ground. This mechanism helpsthe robot to move fast against the surface which produces the cheetah like running or movement.
The video shows the working of the gripper:
References:
[1]: Leveraging elastic instabilities for amplified performance: Spine-inspired high-speed and high-force soft robots by Yichao Tang, Yinding Chi, Jiefeng Sun, Tzu-Hao Huang, Omid H. Maghsoudi, Andrew Spence, Jianguo Zhao3, Hao Su , Jie Yin, 08 May 2020:Vol. 6, no.19, eaaz6912, DOI: 10.1126/sciadv.aaz6912 [2]: https://royalsocietypublishing.org/doi/pdf/10.1098/rsif.2017.0101 [3]: https://www.youtube.com/watch?v=Z5QAwAOxORo&feature=youtu.be