Project March: learning to walk
For the last 8 years Project MARCH has pushed exoskeleton technology. The vision of Project MARCH is to improve the quality of life for people with paraplegia using exoskeleton technology. A team of 28 students takes on the challenge of self-balance this year.
Project MARCH
The simple act of walking is natural to most. Unfortunately not everybody is as lucky. In the Netherlands, 8.000 people suffer from paraplegia. Paraplegia means you have no feeling in your legs and part of your upper body, below height of injury. This means you are wheelchair bound, which has big effects on your mental and physical health. We, as Project MARCH, compete in the Cybathlon. A competition focused on assistive technology for everyday use with and for people with disabilities. With our self-developed exoskeleton we compete in the exoskeleton race. A race with 9 obstacles for our pilot to complete. One of these challenges includes self-balancing walking. This means the pilot cannot use crutches or any other assistance for walking. This is such a big challenge only a few parties around the world have been able to achieve it. This year Project MARCH will try to achieve it as the main goal of this year. To be able to tackle this challenge we have had to redesign a big part of the exoskeleton. Project MARCH has a lot of different functions and departments within the team. Management, operations, human, mechanical, software, electrical and embedded systems. I will explain two systems, electrical and embedded systems, as I think these are both very interesting for someone with an electrical engineering background.
Electrical system
If you compare the exoskeleton to a human, the electrical system would be its cardiovascular system and the embedded system would be its central nervous system. The following figure shows both systems. The joints of our exoskeleton are the mechanical systems that make sure the frame can move in linear or rotational directions. These joints have names like HAA, HFE, KFE, ADPF. This name is a description of where the joint is placed and which movement it is responsible for. The HAA is the hip abduction and adduction joint. The HFE is the hip flection and extension joint. The KFE is the knee flexion and extension joint. The ADPF is the ankle dorsi plantar flexion joint.
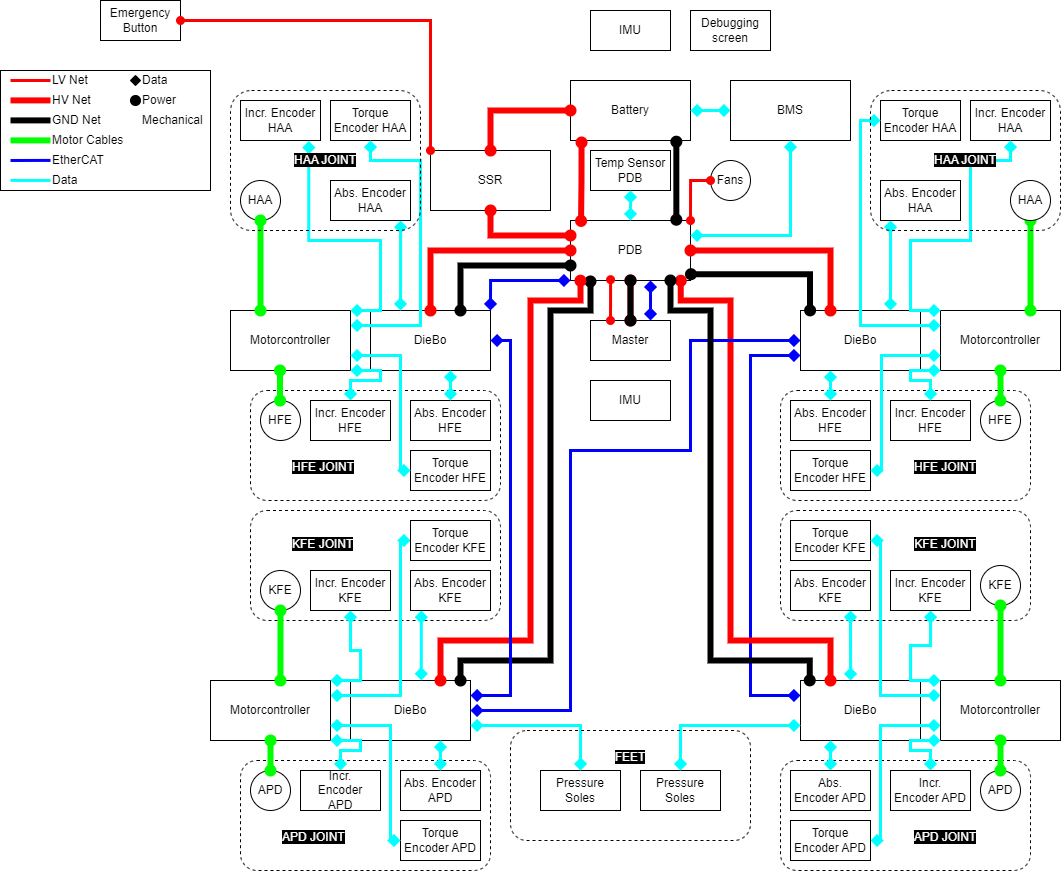
Figure 1: Electrical schematic
I will first explain the electrical system. If you follow all power lines you will see they all combine at the Power Distribution Board (PDB). This is the heart of our exoskeleton. It is designed by our electrical department and its designed to safely and reliably transfer the power from the battery to the rest of the system. A Solid State Relay (SSR) is added to ensure to safety of the pilot. It is switched manually using an emergency button so you switch off the high voltage to all the joints. As balance is this years goals, the electrical system of the exoskeleton had to be improved. One of the main challenges was reliability. Each year we need a significant amount of training time with our pilot. Balance is something we can not do on our own. The pilot has a huge impact on the system. Thus, our pilot has to train a lot with the exoskeleton. In previous years the training time has always been somewhat limited as a lot of things broke down over time. Replacing, repairing and debugging can take a lot of time. This year we put a lot of effort into making the system more reliable and including ESD protection to relieve some stress of the rest of the system. The embedded system is responsible for the communication in the system. To communicate between the major components we use EtherCAT. This is a protocol which uses ethernet hardware in combination with dedicated hardware to achieve very high communication speeds. The master of the EthercCAT network is a computer. On this computer the high level control for the system is designed by the software department. The output of this high level control is than communicated to the EtherCAT slaves. The EtherCAT slaves of the network are the DieBos and the PDB. The DieBo is designed by the embedded department and is responsible for the communication between the joints and the computer. It communicates with the motorcontroller and sensors using a UART implementation. A major goal for the embedded department was adding support for torque sensors and pressure soles. The high level control of the exoskeleton has been changed a lot in order to achieve balance. One of the major differences is the switch from position control to torque control. This means instead of actuating the exoskeleton according to the position of it, we want to actuate the force of each joint. For us to be able to do this we need a torque estimation. We have decided to add torque sensors in all the joints, and for us that means we have to add support for the sensors onto the PCBs. Another sensor which has been heavily researched by previous MARCH years, but has never been included in the final exoskeleton is the pressure sole. This is a force sensors which is placed in the sole of the foot. This sensor can measure the force different parts of the foot exercise on the ground. This year we finally have a implemented integrated into our PCBs.
Student teams
The electrical department and embedded department both consist of 2 people, but the whole team consists of 28 people. A big multidisciplinary team which I am happy to be a part of. This year has given me a lot in terms of self-development, but working in a team this big has also given me a chance to work with people which had a different technical background. This has taught me so much in terms of communication and practical technical knowledge. So I can wholly recommend joining a student team. Just make sure you join a project you are absolute excited about. If that happens to be related to exoskeleton, be sure to check out our the livestream of our design presentation at the 24th of February where we will reveal the design of the exoskeleton of MARCH VIII. If you’re interested in joining next years team, MARCH IX, sign up on our website at the join page where you can find a lot of information.